Un robot está formado por los siguientes elementos: estructura mecánica, transmisiones, actuadores, sensores, elementos terminales y controlador.
LA ESTRUCTURA DE UN ROBOT:
Mecánicamente, es el componente principal. Está formado por una serie de elementos estructurales sólidos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos.
Como su nombre indica, es el que regula cada uno de los movimientos del manipulador, las acciones, cálculos y procesado de la información. El controlador recibe y envía señales a otras máquinas-herramientas (por medio de señales de entrada/salida) y almacena programas.
Existen varios grados de control que son función del tipo de parámetros que se regulan, lo que da lugar a los siguientes tipos de controladores:
- de posición: el controlador interviene únicamente en el control de la posición del elemento terminal;
- cinemático: en este caso el control se realiza sobre la posición y la velocidad;
- dinámico: además de regular la velocidad y la posición, controla las propiedades dinámicas del manipulador y de los elementos asociados a él;
- adaptativo: engloba todas las regulaciones anteriores y, además, se ocupa de controlar la variación de las características del manipulador al variar la posición.
| Dispositivos de entrada y salida |
Los más comunes son:
teclado, monitor y caja de comandos (teach pendant).
En el dibujo se tiene un controlador (computer module) que envía señales a los motores de cada uno de los ejes del robot y la caja de comandos (teach pendant) la cual sirve para enseñarle las posiciones al manipulador del robot.
Se pueden utilizan estas tarjetas para comunicar al robot, por ejemplo, con las máquinas de control numérico (torno, ...). Estas tarjetas se componen de relevadores, los cuales mandan señales eléctricas que después son interpretadas en un programa de control. Estas señales nos permiten controlar cuándo debe entrar el robot a cargar una pieza a la máquina, cuando deben empezar a funcionar la máquina o el robot, etc.
Entre estos se encuentran los ejes que facilitan el movimiento transversal del manipulador y las estaciones de ensamblaje, que son utilizadas para sujetar las distintas piezas de trabajo.
En la estación del robot Move Master EX (Mitsubishi) representada en la figura se pueden encontrar los siguientes dispositivos especiales:
- Estación de posición sobre el transportador para la carga/descarga de piezas de trabajo.
- Eje transversal para aumentar el volumen de trabajo del robot.
- Estación de inspección por computadora integrada con el robot.
- Estación de ensamble.
El robot cuenta con señales de entrada/salida para poder realizar la integración de su función incorporando estos elementos.
UNIDAD DE CONTROL DE UN ROBOT:
El diseño de equipos de
automatización industrial requiere los componentes adecuados que proporcionan
los resultados que usted necesita para permanecer a la vanguardia en este
innovador mercado. Hirose electronic ofrece interconexiones líderes en la
industria que le permiten diseñar y producir sus productos con calidad,
precisión y confianza.
Entre los colectores para
aplicaciones de cámara automatizada para fabricar se cuentan la coaxial de 75 Ω, USB/micro USB, RJ45,
circular, FPC/FFC y placa a placa. Para sus necesidades de robótica
automatizada de fábrica, Hirose ofrece conectores internos y conectores de
interfaz en línea y cable a placa para sensores de panel de control de
servomotores. Los conectores de Hirose para aplicaciones de unidad de control
robótica incluyen señal de control y conectores colgantes didácticos, además de
conectores para conexión interna del panel de control.
Las aplicaciones Servo
Amp de Hirose cuentan con conectores de interfaz para motores, alimentación, LAN
y accesorios de host, además de conectores internos IPM, de apilado y cable a
placa. Los conectores para aplicaciones de servomotores cuentan con conectores
de interfaz para alimentación, frenos y codificadores y también conectores
internos para codificación de pulso. Hirose brinda una variedad de conectores
para interfaz humano-máquina, que cuenta con pequeños conectores de entrada y
salida, pequeña coaxial de bajo perfil, FPC/FFC, cable a placa, placa a placa
de bajo perfil, placa a placa paralela y placa a placa de alta velocidad.
SENSORES DE UN ROBOT:
Introducción
Un robot es, por
definición, una máquina capaz de interactuar con su entorno. Si es móvil, a
menos que se mueva en un espacio absolutamente acotado y preparado para él,
deberá ser capaz de adaptar sus movimientos y sus acciones de interacción en
base a las características físicas de los ambientes con los que se encuentre y
los objetos que hay en ellos.
Para lograr esta
capacidad de adaptación, lo primero que necesitan los robots es tener
conocimiento del entorno. Esto es absolutamente clave. Para conocer el
entorno, los seres vivos disponemos de un sistema sensorial. Los robots no
pueden ser menos: deben poseer sensores que les permitan saber dónde están,
cómo es el lugar en el que están, a qué condiciones físicas se enfrentan, dónde
están los objetos con los que deben interactuar, sus parámetros físicos, etc.
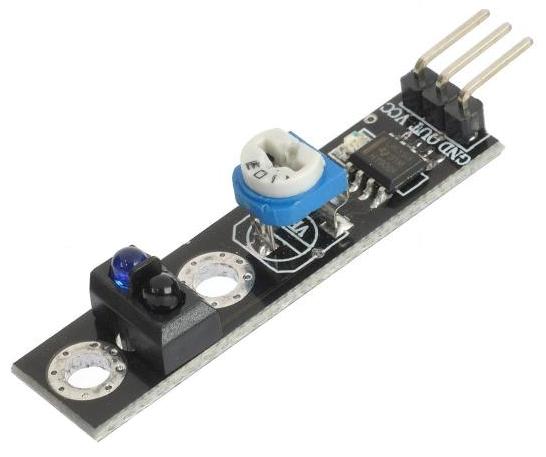
Para esto se utilizan
diversos tipos de sensores (o captadores), con un rango de complejidad y
sofisticación que varía desde algunos bastante simples a otros con altos
niveles de sofisticación de hardware y más aún de complejidad de programación.
Detalles sobre los
sensores para robots
Existe una amplia
variedad de dispositivos diseñados para percibir la información externa de una
magnitud física y transformarla en un valor electrónico que sea posible
introducir al circuito de control, de modo que el robot sea capaz de
cuantificarla y reaccionar en consecuencia.
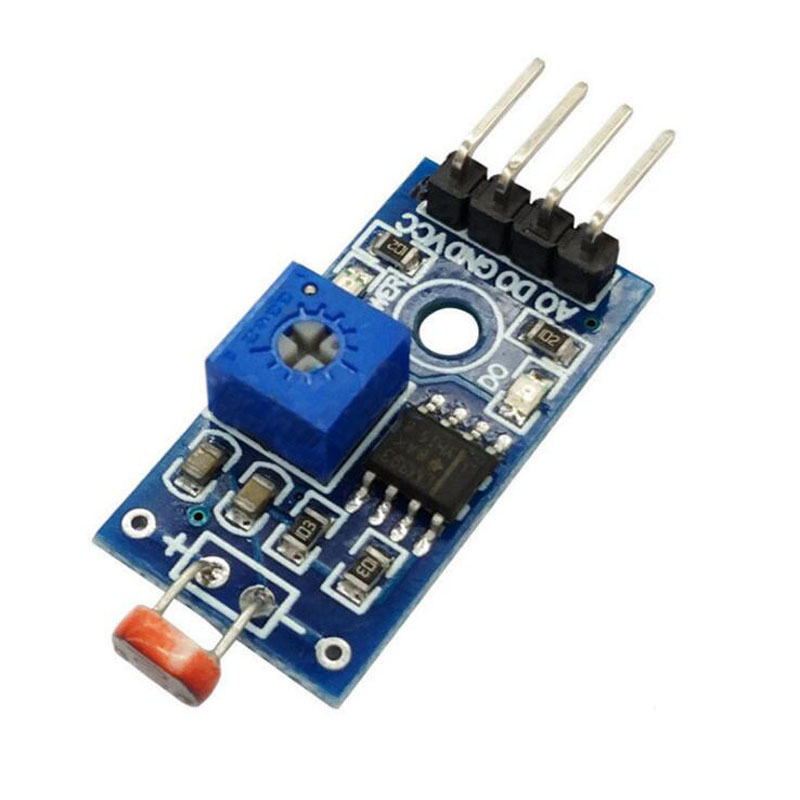
Un sensor consta de
algún elemento sensible a una magnitud física —como por ejemplo la intensidad o
color de la luz, temperatura, presión, magnetismo, humedad— y debe ser capaz,
por su propias características, o por medio de dispositivos intermedios, de
transformar esa magnitud física en un cambio eléctrico que se pueda alimentar
en un circuito que la utilice directamente, o sino en una etapa previa que la
condicione (amplificando, filtrando, etc.), para que finalmente se la pueda
utilizar para el control del robot.
Un actuador es un dispositivo capaz de transformar
energía hidráulica, neumática o eléctrica en energía mecánica. Los
actuadores pueden verse como transductores; por ejemplo, el motor convierte
energía eléctrica (se conecta a una fuente de alimentación) en energía mecánica
rotacional (movimiento). Recuérdese que un transductor es
cualquier elemento que convierte una forma de energía en otra forma de
energía.
ACTUADORES DE UN ROBOT:
Un actuador es un dispositivo capaz de transformar
energía hidráulica, neumática o eléctrica en energía mecánica. Los
actuadores pueden verse como transductores; por ejemplo, el motor convierte
energía eléctrica (se conecta a una fuente de alimentación) en energía mecánica
rotacional (movimiento). Recuérdese que un transductor es cualquier
elemento que convierte una forma de energía en otra forma de energía.
Los elementos que
conforman un actuador son los siguientes:
- Sistema de accionamiento: es el encargado de
producir el movimiento
- Sistema de transmisión: es el encargado de
transmitir el movimiento del actuador a otros elementos.
- Sistema reductor: encargado de adecuar el
torque y la velocidad del actuador a los valores requeridos.
- Sistema de control: encargado de enviar las
órdenes al actuador para que se mueva de cierta manera.
Existen diferentes tipos
de actuadores:
- Hidráulicos
- Neumáticos
- Eléctricos



















![10 Robots humanoides más avanzados del mundo [VÍDEO] | Videos ...](https://i.pinimg.com/originals/32/71/22/327122ed2279dbc4f258c26b50890372.jpg)




{kind=link}